The Scenario
|
|
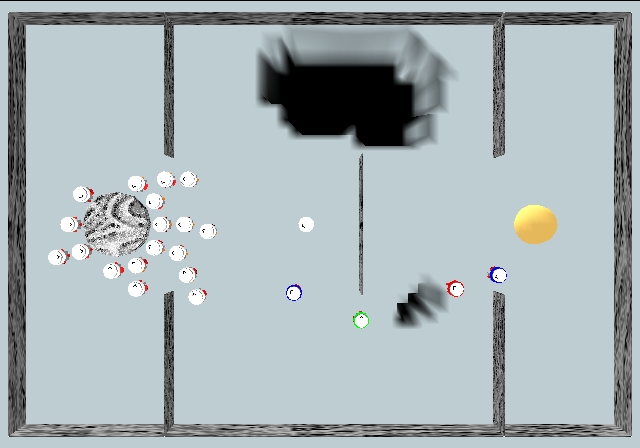
- The scenario
- It is a search and retrieve task which gives an example of
the possible activities a swarm-bot could carry out.
Moreover, this scenario shows how the s-bots can rely on
self-organisation and self-assembly to achieve a given task.
- The scenario solved by 12 real s-bots
|
|
|
|
|
Basic Behavioral Capabilities
|

|
- Co-ordinated motion
- This concerns the design of control policies for the
development of all the behavioural skills required either (i) by a
single s-bot to co-ordinate its motion with respect to the
movement of other s-bots located nearby (e.g., an aggregation
of s-bots which negotiate a common direction of movement); or
(ii) by a swarm-bot in order to achieve particular results
without incurring into undesired circumstances (e.g., reaching a
certain target area without crashing into obstacles, or falling into
troughs, etc.).
|
|

|
- Hole/obstacle avoidance
- This task has been designed for studying all-terrain
collective navigation strategies. It can be considered an instance of
the broader family of all-terrain navigation tasks, which generally
tackle the problem of navigating in complex environments presenting
obstacles, rough terrains, holes, gaps or narrow passages. Compared to
other problems in the all-terrain navigation family, the hole/obstacle
avoidance task represents a relatively simple instance, but it is still
very interesting for the study of collective navigation behaviours for
a swarm-bot.
|
|
|
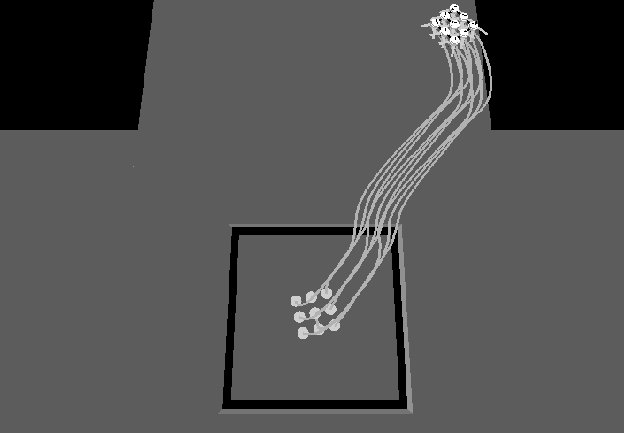
- Passing over a hole
- One of the main features a swarm-bot can exhibit
is the ability to assemble in physical structures that can solve
problems a single individual cannot cope with. One example of such a
problem is passing over a trough that would block the navigation of a
single robot. In similar situations, physical connections serve as
support for those s-bots that are suspended over the gap, so
that the swarm-bot as a whole can continue moving.
|
|

|
- Moving on rough terrain
- All-terrain navigation requires the ability to cope with a
generic rough terrain, comprising slopes and obstacles that have to be
climbed. The swarm-bot has been designed intentionally for this
purpose, as it presents mechanical features that allow a single
individual to cope with moderately rough terrains. In this section, we
show how cooperation among individual s-bots is beneficial for
rough terrain navigation, whenever the individual abilities are too
constraining.
|
|
|
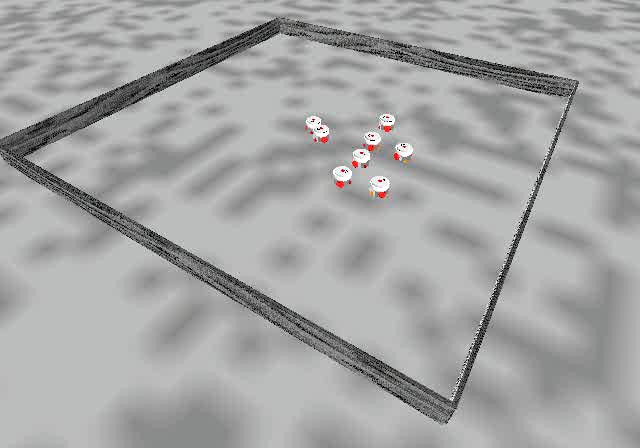
- Aggregation
- It concerns the design of control policies for the
development of all the behavioural skills required by single s-bots
to get close and eventually to physically connect to each other or to
an already formed swarm-bot (i.e., s-bots
physically connected) by means of a gripper.
|
|

|
- Self-assembly
- This section addresses the problem of synthesizing
controllers for groups of s-bots capable of adaptively
connecting to each other, forming an assembled structure---referred to
as swarm-bot and/or to an object (called the prey). In particular, we focus on controlling a group of s-bots in a fully
autonomous
way in order to locate, approach and connect to another sbot or the prey.
|
|
|
- Functional Self-assembly
- This section addresses the problem of synthesizing
controllers for groups of s-bots capable of adaptively
connecting to each other, forming an assembled structure---referred to
as swarm-bot and/or to an object (called the prey). In particular, we focus on functional
self-assembling, that is, the self-organized creation of a physically connected structure, which should be functional to the accomplishment
of a particular task, by designing controllers for s-bots capable of forming a swarm-bot any time environmental
contingencies prevent the single s-bot to achieve its goal.
|
|
|
- Adaptive division of labour
- A swarm of robots can generally perform several different
tasks concurrently. The performance of the final results depends on the
number of robots that are participating in each task. If they are too
few, they could not succeed. If they are too many, they could interfere
with each other. This section illustrates our studies about
self-organised solutions for the division of labour in a swarm-bot.
|
|
Finding Object / Goal
|
|
- Finding object/goal
- This concerns the design of control policies for the
development of all the behavioural skills required by the s-bots
in order to establish a path that links a starting area to a target
area by exploiting the s-bots as beacons.
|
|
Cooperative Transport
|
 |
- Cooperative transport
- This concerns the design of control policies for the
development of all the behavioural skills required by a group of s-bots
in order to approach an object and to cooperativelly transport it
towards a target location (e.g., the nest).
|
|



