|
Control >> Finding object/goal >> Goal search
Goal search
In this section, we present a second series of experiments,
in which a
group of three s-bots has to find a goal item, which we refer
to as the
prey. We will shortly describe the controller in the following
section. Afterwards, we detail the
experimental setup. Finally, we
discuss the results of our experiments.
Controller
In principle, the same behaviour based controller as
described previously is also used for this experiment. For
simplicity we have not mentioned before the behaviour in case an s-bot
perceives the prey, which depends on the current
state of the s-bot:
- Explorer: When detecting the prey, an explorer will
attempt to connect to it by extending the chain it is currently moving
along. It
may only connect in case it perceives no more than one chain member
and the prey.
- Chain member: A chain member that perceives the prey may
not disaggregate from the chain.
- Lost: A lost s-bot perceives the prey as an
obstacle and has to
continue its random walk in order to regain contact to a chain.
Experimental setup
As shown in Figure 1, the experimental
environment is the same as the one used for the previous
experiment. As indicated on the top right corner of the image, a prey,
which is represented by an s-bot with its red LEDs activated,
is
placed at a distance of 1.40 m from the nest. Note that the prey, by
having the red LEDs activated, can be distinguished from a chain or
the nest. The three s-bots have to find the prey and, by
forming a
chain, establish a connection between the prey and the nest. We define
a connection as a chain of s-bots that allows other s-bots
to navigate
back and forth between nest and prey.
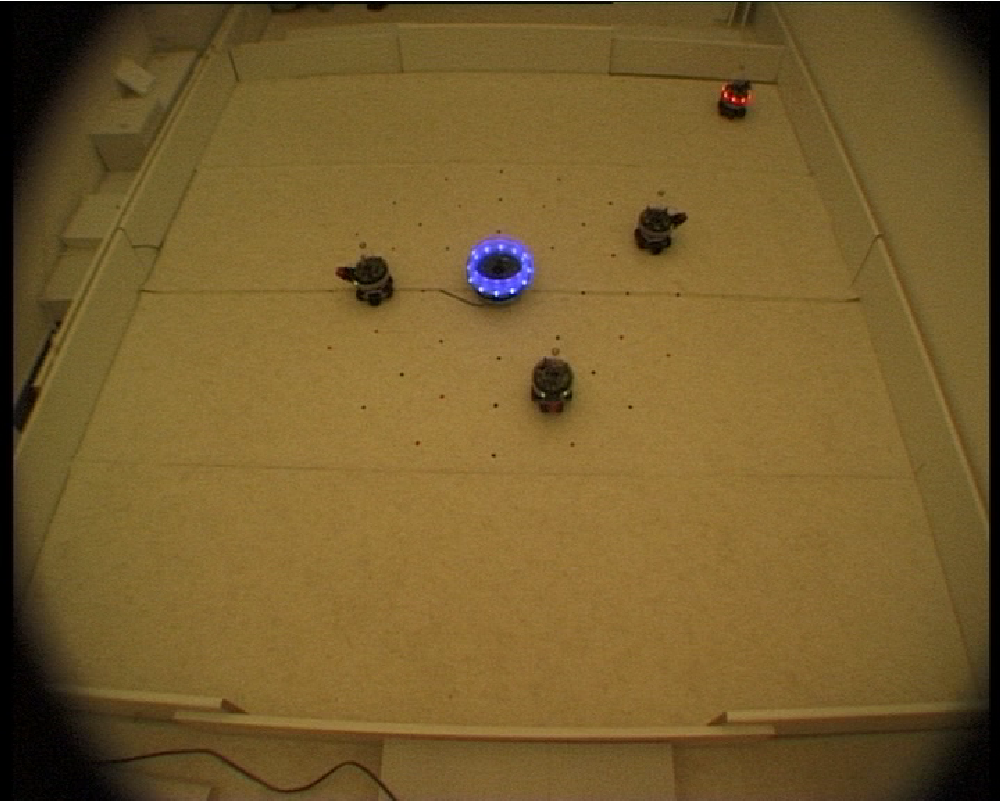
Figure 1. The experimental environment: a
squared arena with a side length of 2.40 m with an s-toy,
which represents the nest, placed in its center. In order to be
recognized by the s-bots the blue LEDs of the s-toy
are turned on. As indicated by the black and red dots around the nest,
there are 40 different initial positions at three distances and 16
angles. At the beginning of an experiment an s-bot is
randomly placed at one of them. Furthermore, an s-bot's
initial orientation is determined randomly as well.
Given that an s-bot has a perceptual range of
approximately 1 m to
recognize red LEDs, it is sufficient that one s-bot starts a
chain
into the direction of the prey in order to perceive it. However, a
chain of one s-bot is not yet sufficient to establish a
connection
between nest and prey because the perceptual range for the three other
colours is approximately 50 cm.
Identical to the previous experiment, each trial is
characterized by
the values of the two control parameters P(expl->chain)
and P(chain->expl), and by a seed that initializes a
random number generator to determine the initial positions of the
robots, and their probabilistic choices during an experiment. Again,
for each of the two probabilities three different values are applied:
P(expl->chain) ∈ {0.01;0.1;1}
P(chain->expl) ∈ {0.001;0.01;0.1}.
For this experiment we have tested all nine possible
combinations of
the two parameters. For each combination, ten seeds are used to
initialize an experiment. An experiment runs for 100 seconds.
Results
Figure 2 shows four screenshots of one
successful trial where two s-bots are aggregated into a chain
that
establishes a connection between nest and prey which is exploited by
the third s-bot to approach the prey.
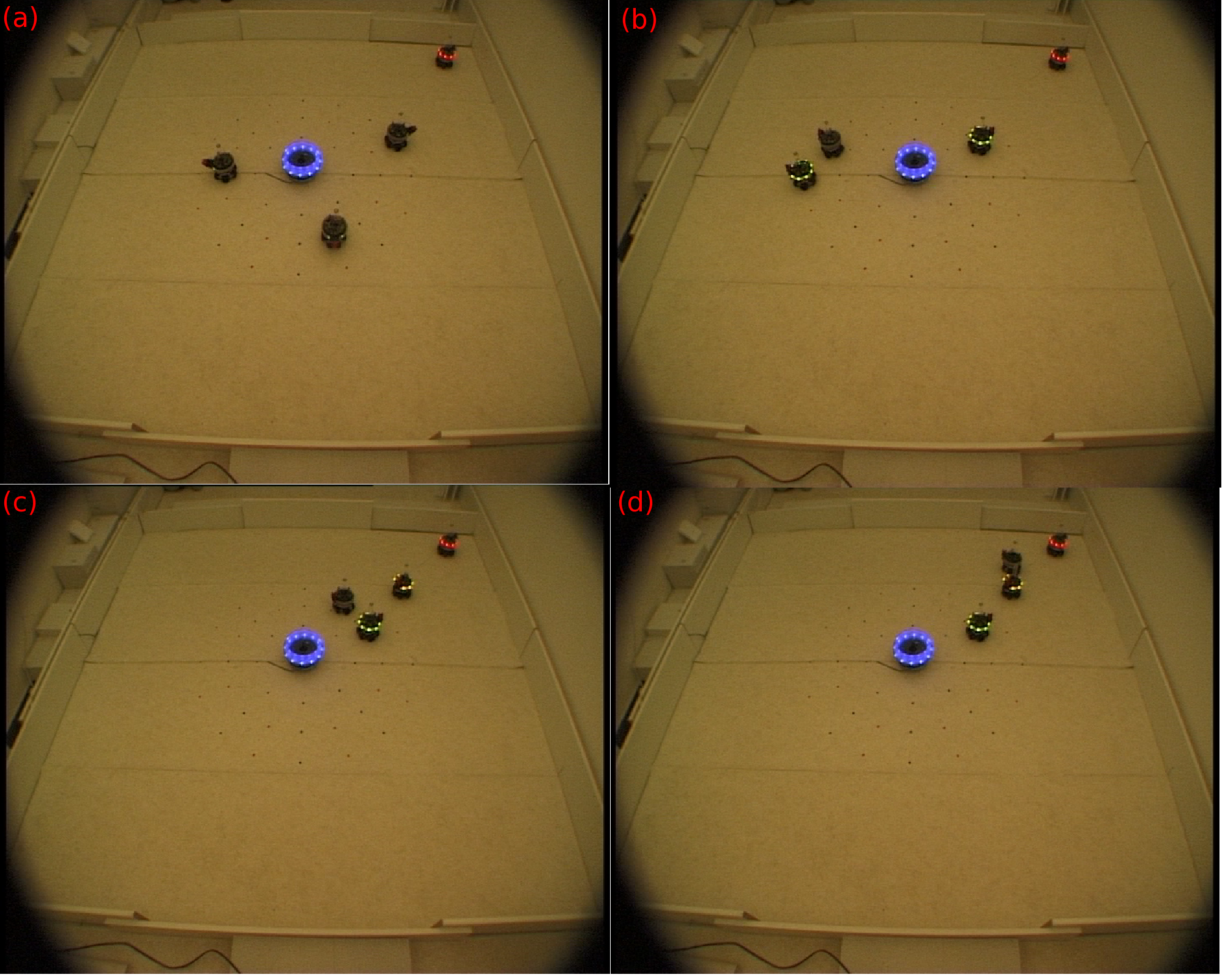
Figure 2. Four screenshots of one successful
trial: (a) the initial placement; (b) one s-bot connected
itsself between nest and prey; (c) a second s-bot connected
itsself; (d) the last s-bot moving along the established
connection and approaches the prey.
In 81 of the 90 trials at least one s-bot has
connected itsself
between the nest and the prey within the time limit of 100 seconds. In
5 of the 9 unsuccessful trials the pobability set
P(expl->chain)=0.01, P(chain->expl)=0.001 was used. In 75 trials
at least two s-bots connected themselves between nest and
prey, in this
way establishing a connection between the two objects that can be used
by other s-bots for the purpose of navigation. In 59 trials
the third s-bot exploited the established connection to
navigate
towards the
prey.
Figure 3 shows the completion times of the first,
second and third s-bot to connect to the prey. We define the
completion time as the time when an s-bot is aggregated into
a chain
between nest and prey. If no connection can be established, the value
100 is taken.
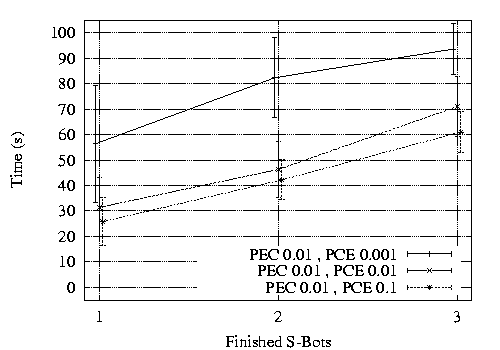
Figure 3(a)
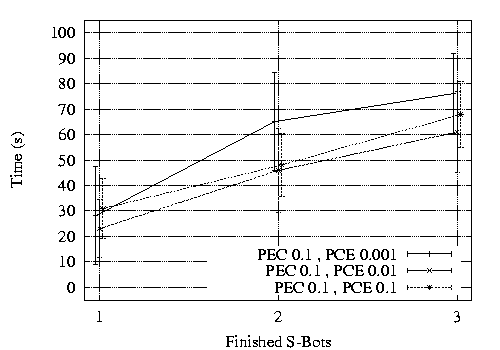
Figure 3(b)
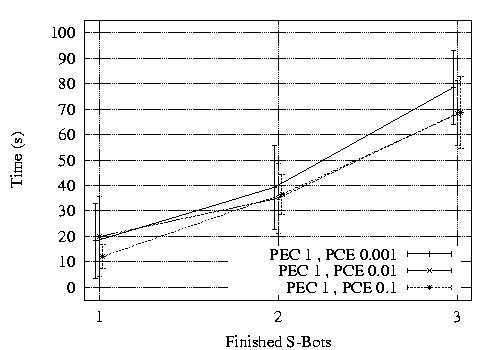
Figure 3(c). The completion times of the
first, second and third s-bot to connect to the prey for (a)
P(expl->chain)=0.01, (b) P(expl->chain)=0.1, and (c)
P(expl->chain)=1. We define the completion time as the time when an s-bot
is aggregated into a chain between nest and prey. If no connection can
be established, the value 100 is taken. Errorbars indicate the standard
deviation.
For this comparably simple setup a wide range of parameters
leads to a
similar successful performance. Therefore, it is not possible to
determine which of the tested parameters is the best one. However, we
observed that in general parameter sets with a very low probability to
disaggregate from a chain are less successful than those with a higher
value of P(chain->expl). This can be explained by the
fact that a lower value of P(chain->expl) leads to a
lower exploration rate. Once established, a chain has a longer
lifetime and therefore no new chains are formed into unexplored areas,
in this way blocking the exploration of the environment.
Example movies: Example
I of goal search (MOV, 4.8 MB).
Example
II of goal search (MOV, 3.6 MB).
|



